docs
开发者社区 Linux 设备开发引导
支持的开发板
| 芯片厂商 | 芯片型号 | 开发板内部代号 | 编译框架 | 状态 |
|---|---|---|---|---|
| Amlogic | A112 | nana_l | buildroot | 支持 |
| Amlogic | S905D | nana_t | buildroot | 支持 |
| Amlogic | S905D | nana_t2 | buildroot | 支持 |
| Amlogic | S905D | rm101 | buildroot | 支持 |
| Amlogic | S905D | rp102 | buildroot | 支持 |
| Amlogic | A113 | banban_m | buildroot | 开发中 |
系统架构图
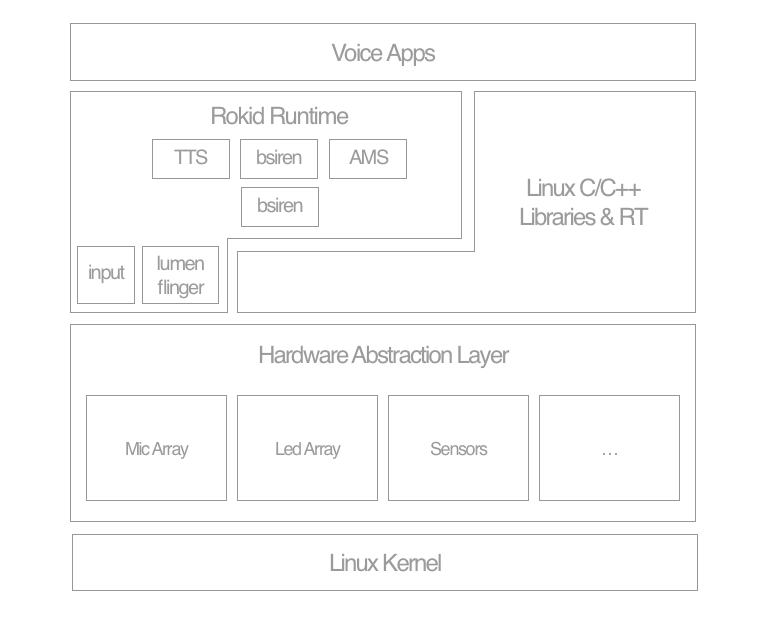
系统特性
| 模块 | 功能介绍 | 代码位置 | 实现语言 | 状态 |
|---|---|---|---|---|
| AMS | Application Manager Service Rokid语音应用的生命期调度、事件分发框架 | robot/openvoice/ams | C | 开发中 |
| Speech SDK | 封装了与Rokid云服务交互协议,包括ASR、NLP、TTS等开发服务 | robot/openvoice/speech | C++ | 支持 |
| Blacksiren SDK | 输入麦克风数据,经内部拾音算法及云端服务(调用SpeechSDK),输出语音识别结果、各种拾音事件 | robot/openvoice/blacksiren | C++ | 支持 |
| openvoice_proc Service | 将Blacksiren封装成服务 | robot/openvoice_proc | C++ | 支持 |
| Linux systemd | Linux Init System – systemd | C/C++ | 支持 | |
| openvoice app Zygote | 由该进程负责启动所有语音应用 | robot/service/zygote | C/C++ | 支持 |
| PulseAudio | 提供Audio服务及路由机制 | buildroot原生 | C | 支持 |
| TTSFlinger Service | 提供设备端的语音转文字服务 | robot/services/ttsflinger | C++ | 支持 |
| Lumenflinger | 提供灯光渲染服务 | robot/services/lumenflinger | C++ | 支持 |
| BTFlinger | 提供蓝牙功能 | robot/services/btflinger | C | 支持 |
| 系统电量服务 | 系统电量服务 | C/C++ | 支持 | |
| 应用包管理 | 应用安装升级 | C/Node.JS | 支持 | |
| OTA | 系统升级 | C | 支持 | |
| 蓝牙配网服务 | 提供通过蓝牙来配置Wifi网络 | C | 支持 | |
| 热点配网 | 提供通过设备开启热点方式来配置网络 | C | 开发中 | |
| CloudClient C版 | 实现Cloud Skill功能/应用支持(如天气、新闻、音乐等),适用小内存系统 | C | 开发中 | |
| CloudClient Nodejs版本 | 实现Cloud Skill功能/应用支持(如天气、新闻、音乐等Cloud应用)、适用大内存系统 | C/Node.JS | 支持 | |
| 系统音量控制 | 提供系统及的音量控制服务 | C/C++/Node.JS | 支持 | |
| 灯光寻向指示 | 提供唤醒、对话时的寻向指示 | C/C++/Node.JS | 支持 | |
| 媒体播放器 | 媒体播放器 | robot/external/librplayer | C/C++ | 支持 |
| 蓝牙音乐应用 | 媒体播放器 | robot/apps/xxx | C/C++ | 支持 |
| 聊天应用 | 提供系统语音聊天服务 | C/C++/Node.JS | 支持 | |
| Android ADB | 提供ADB支持,方便开发 | C++ | 支持 | |
| Android HAL | 提供Android HAL,方便实现Mic Array,Led Array, Sensor等 | C++ | 支持 | |
| Android Binder | 提供进程间通讯机制 | C++ | 支持 | |
| Input Manager | 提供按键、触摸、鼠标事件SDK | C++ | 支持 |
编译
环境要求
- Ubuntu 14.04.5 LTS
- gcc 4.8.4 及以上
Amlogic芯片
Rokid对厂商代码的修改
U-Boot
修改了厂商代码,支持Rokid的板级配置目录
Kernel
修改了厂商代码,支持Rokid多型号板子的DST配置目录
BuildRoot Package
扩展的buildroot_external
rokid_br_external 是 Rokid 通过 BuildRoot 的 external 机制,将 Rokid 提供的包或第三方库的编译配置放在此处
FFWT
需要使用Rokid对该包的配置,核心的语音算法会依赖该动态库
NE10
需要使用Rokid对该包的配置,核心的语音算法会依赖该动态库
Node.js
需要使用 Rokid 对该包的配置,CloudappClient-Nodejs 依赖该配置
TinyPlay
需要使用 Rokid 对该包的配置,目前 Mic Array 使用了 Tinyplay 接口读取数据,而 Amlogic 源码释放出的 Tinyplay 版本存在超过2个channel时读取音频数据会存在 Bug,所以需要使用 Rokid 目前配置的版本。
编译指令
目前支持64位版本,32后续会考虑支持。
source rokid_br_external/build/setenv.sh
输出
Environment setting is OK!
Just type 'lunch' and you will get a list of choices, or you can type 'lunch [choice]' to lunch directly.
lunch
输出
You are building on Linux
echo Lunch menu... pick a combo:
1. nana_t_s905d_release
2. nana_l_a112_release
3. rm101_s905d_release
4. rp102_s905d_release
5. banban_m_a113_release
6. nana_t2_s905d_release
Which would you like? [2]
目前使用注意事项
关于刷机
如果你的设备是mini没有接串口,无法在U-Boot下进入刷机模式,请看如下指示: 刷机镜像是:output/rm101_s905d/images/aml_upgrade_package.img 先打开PC端的windows版的amlogic刷机工具,Amlogic也提供了linux版本。
mini让他进入update模式的指令(无串口,无法进入uboot的情况下), adb shell登录到设备上,敲如下指令:
fw_setenv bootcmd "run update"
reboot
之后PC端的刷机程序就会检测到设备进入刷机模式,按软件的刷机提示刷机即可。
关于配置网络
由于目前配网模块还在开发中,需要手动配置:
vi /etc/wpa_supplicant.conf
将
4 network={
5 key_mgmt=NONE
6 }
修改为:
network={
ssid="你的WiFi网络名"
psk="你的密码"
}
然后启动网络
/etc/init.d/S42wifi stop
/etc/init.d/S42wifi start